 供需大厅
供需大厅
 登录/注册
登录/注册 供应商登录
供应商登录











荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。
欢迎来到荣格工业资源网!

供需大厅

登录/注册

公众号

更多资讯,关注微信公众号

小秘书

更多资讯,关注荣格小秘书

邮箱
您可以联系我们 info@ringiertrade.com

电话
您可以拨打热线
+86-21 6289-5533 x 269
建议或意见
+86-20 2885 5256

顶部

荣格工业资源APP
了解工业圈,从荣格工业资源APP开始。


在自动驾驶汽车的征途中,自动驾驶车辆必须越来越多地完成车辆行驶情况、周围环境情况的探测和处理任务。为完成这些十分重要而且艰巨的任务就需要更好的、更加灵敏的传感器技术。Magna(麦格纳)开发了满足这些要求的成像雷达,探测可靠性提高到了长期以来人们一直梦寐以求但又难以实现的高度。

为了能够实现安全可靠的汽车自动驾驶,汽车所使用的传感器也有了越来越多的变化:汽车自动驾驶程度的提高也就意味着人类推出了越来越多的驾驶控制系统,车辆的驾驶控制任务也越来越多地由安装在汽车上的传感器、数据处理器和执行器所承担。举一个例子:汽车驾驶辅助系统的早期功能都是针对某些紧急情况发出预警,例如第一个前方碰撞预警系统FCW问世时的情况就是如此。这样的驾驶辅助系统在设计时就是针对某种可能发生的碰撞现象而事先发出警告信息的系统。因此,驾驶员在收到这样的预警之后首先要做的就是验证发出的预警信息、然后认真负责地采取必要的、合适的对策,诸如紧急刹车制动。这类驾驶辅助系统都是完成单一任务的“专家”。
这一“单一专家”的特性也反映在它们的传感器设计之中了。这类传感器和控制系统的“感知能力”非常有限:都是针对某一具体应用量身定制的、英文缩写为FoV的“小视野传感器”。由于驾驶员参与了这类驾驶辅助系统的检测、判断,因此传感器和控制系统有一定程度的误检误判还是可以接受的:因为最终要由驾驶员做出的正确判断和决策、执行必要的补救措施。
随着自动驾驶的问世,驾驶辅助系统所承担的、所要完成的任务也都增加了不少:在不受驾驶员操控的影响下,自动驾驶系统要完成越来越多复杂行驶状况的探测,这也不可避免地对所使用的传感器和传感技术提出了更高的要求。
关键驾驶情况的示例
随着驾驶辅助系统所控制的功能和范围的不断增加,从半自动到全自动驾驶,自动驾驶控制系统必须掌握对越来越复杂、越来越重要的关键驾驶情况的控制。这里至关重要的是:自动驾驶的车辆也包括了车内的驾驶人员都能对突然出现的异常情况做出充分且正确的反应。这里所指的“突然出现的异常情况”包括了那些看起来不大、难以探测但往往会伤害车辆前后和侧面行人、造成重大人身和车辆伤害事故的所有路况。一个典型的例子就是从停靠在路边车辆后面突然“冒出来”的行人——这种驾驶场景在城市里并不少见。
除此以外,自动驾驶控制系统还必须能够绝对安全和独立地解决一些非常罕见的意外驾驶情况——行驶到立交桥下的汽车遇到的情况就是一个最好的例子。当立交桥下堵车状态结束时,自动驾驶系统会控制着车辆从水平位置启动、并控制车辆驶过立交桥。此时,自动驾驶车辆的控制系统应知道与前方的桥梁之间还有多远的距离、在车载多普勒测速系统的帮助下测定以什么速度驶过立交桥。如果不能清楚地探测到当前的行驶状况、不能清楚地得出这两个数据就存在误检误判的风险。而误检误判的结果会导致两种不好的情况:一种是误检到立交桥下的交通堵塞已经结束、但实际上仍然堵车,若此时自动驾驶系统启动了车辆自动驾驶就会导致在向前行驶时会采取原来不必采取的紧急制动。而另一种情况也非常要命:桥下的堵车过程已经结束,但车辆的自动驾驶探测系统没有得出堵车结束的结论,这种误判会导致严重的、必须不惜一切代价避免的追尾事故。这两个例子都清楚的表明:可靠地检测和清楚地分辨各种不同的物体是汽车自动驾驶的关键。
对未来驾驶环境检测系统的要求
随着车辆需要探测的情况也越来越多,对车辆自动驾驶系统“自动控制”要求的进一步提高。额外增加的自动驾驶探测情况包括了以前不容易或者很难探测到的物体,这也就意味着传感器的探测灵敏度也必须随着自动化驾驶程度的提高而提高。例如未来的自动驾驶探测系统必须可靠地探测出诸如树枝和汽车车轮的小零件之类小而且难以探测的物体。据德国官方的交通事故统计数据,近几年,由于道路上的障碍物导致的车辆交通事故的数量已经超过了4000起,这些事故可以通过自动驾驶功能予以避免。
随着车辆自动驾驶程度的提高,车辆驾驶员也越来越多地失去了“车主和决策者”的角色。这也对自动驾驶探测系统提出了更高的要求。
再举一个小例子:如果某种驾驶情况反复出现,例如每行驶10万公里就出现一千次,那么90%的检测成功率就表示能够正确地探测到并处理好900次这样的驾驶状况。如果剩下的10%是一些不太大的“小问题”,则这样的误检误判还是会被人们接受的。如果剩下10%的误检误判就会导致灾难性的后果,例如会导致车辆的完全损毁、人员重伤甚至死亡且无法由驾驶员凭借一己之力加以纠正和避免,那么即使90%成功率也是不可接受的。
这两个例子都表明:可靠地探测和清楚地识别各种物体是自动驾驶的关键。随着车辆自动驾驶功能的进一步升级,车辆可以自动检测到的驾驶环境也越来越多、越来越复杂。因此,无论自动驾驶汽车的传感器是按照什么原理进行检验、探测的,未来的传感系统都必须满足越来越高要求:随着车辆自动驾驶程度的提高,对环境中的相关物体的探测可靠性也要更高、对被测物体细节的分辨率也要更高。
在电动汽车领域中也可以看到影响未来汽车传感技术的发展趋势。电动汽车的电池容量和续航里程以及可接受的充电时间等方面的相关挑战也反映在电动汽车各个独立电气设备的性能测试之中,包括了电动汽车所使用的传感器。
对成像雷达的要求
成像雷达探测灵敏度的提高也意味着它所使用的传感器的灵敏度整体性能也必须随之提高。这里有两个重点:一个是通过增加输出功率对信噪比产生积极的影响,另一个则采取一切可能的措施抑制或者避免噪声。但这两种方法都有自己的局限性:
● 由于有着各种各样的规定,对传感器信号的发射功率是有限制、甚至是根本不可能提高传感器的信号发射功率的。例如日本就对允许的发射功率有着极为严格的规定。
● 同样,即使提高信号接收能力的技术是可行的,但对信号接收端也有着非常严格的限制和规定。这些限制和规定不仅仅涉及到热噪声,而且还受到半导体工艺技术、芯片和硬件设计等方面的技术问题。
摆脱这种困境的唯一出路就是增加接收器的数量,但这一措施又受到了商业贸易方面的限制。因为接收信道的数量翻倍后仅能减少3dB的信噪比;而信道数量翻倍也意味着要付出明显更高的芯片成本费用、同时也对车载控制计算单元的计算能力也提出了更高的要求。所有这些都会受到“物美价廉”商业理念的影响和限制。
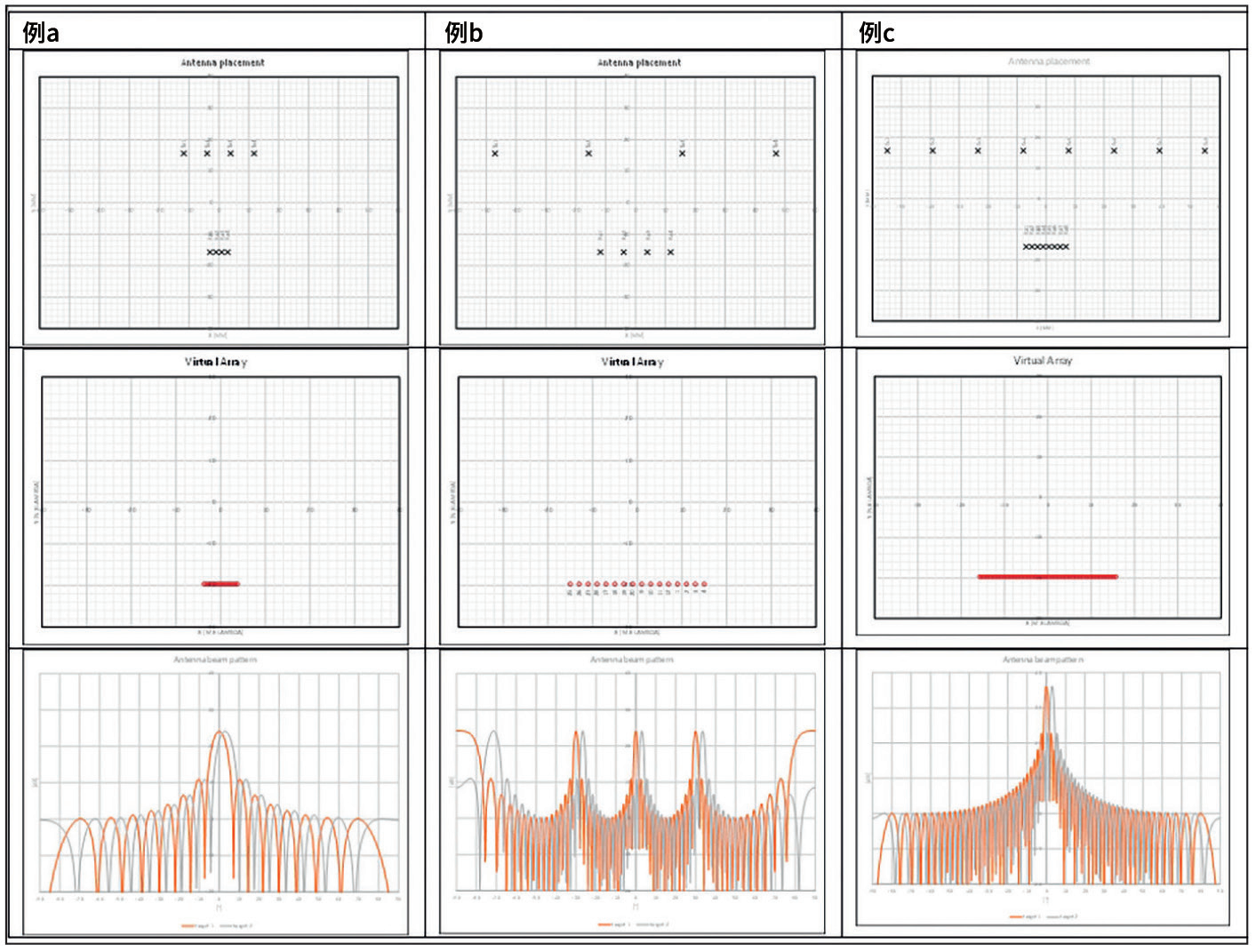
表 1. 不同的天线布置情况以及它们产生的探测孔径和物体分离能力示例 © Magna
为了提高雷达系统的目标分辨率就必须提高雷达基本技术指标中的所有分辨率——距离、方位、仰角和多普勒等分辨率。
如果一个雷达系统能够做到提高这些分辨率,即不仅仅依靠一个或者几个相关物体上的测量点而可靠地评判、分离出被测物体的轮廓,那么这样的雷达系统通常就被称之为成像雷达。
这里必须提到雷达技术领域中的一个专业词汇:角位置,无论是雷达的仰角还是方位角,雷达系统能够实现的角位置主要取决于雷达设计时的两大决定性要素:使用的天线系统和用于确定角度的计算方法。除了方向性之外,所有发射和接收天线的排列、布置——通常被称之为虚拟天线矩阵也对天线的探测性能有着重要的影响。
表1中用不同的实例说明了虚拟天线阵列结构发射天线和接收天线间的基本关系。根据它们的方向性(雷达波束图)可以得到下列信息:
● 实例a:虚拟天线阵列中过小的雷达孔径会导致雷达波束无法区分并排且相互直接靠在一起的两个物体。
● 实例b:通过简单的加大天线元件之间的距离改善雷达孔径可以提高对直接并列靠在一起两物体的识别能力,但也会导致得到的识别图像模糊、出现歧义,只能对这些模糊图像进行部分过滤。
● 实例c:在增加天线元件数量的同时改进雷达孔径不仅改善了相邻物体的识别、分离能力而且还避免了角模糊的发生。
另外,它还增加了主波瓣和旁波瓣之间的距离,这通常也被视为改善了雷达的动态工作性能。
为了得到最佳的雷达角分辨率,汽车生产厂家就要尽可能利用好车辆允许使用的传感器尺寸。为此,汽车设计师们就应该在虚拟天线阵列中尽最大可能利用好可用的天线孔径、并在虚拟天线阵列中布置最多数量的天线元件。如果布置的天线元件数量不足,就成为人们通常所说的稀疏阵列了。稀疏阵列虽然能够实现一定的角分辨率,但必须承受较高的旁波瓣和可能的模糊过滤等缺点带来的不尽人意。由于信号路径数量和高信号丢失等问题的复杂性,在传统印刷电路板的平面PCB天线设计中是很难将大量的天线元件与大孔径两大好处融合到一起的。将两大好处合二为一的替代解决方案就是空气波导平面阵列天线。与传统的平面PCB天线设计相比较,空气波导平面阵列天线明显地将信号传递途径中的信号丢失最小化了。
有许多不同的波达角DoA估算的算法语言,但它们都面临着相同的艰巨挑战:同时接收到不同数量的、不同强度、不同方向和不同噪音水平的雷达反射信号。除了按照规定角分辨率反射回来的标准雷达主波瓣波束信号之外,像MUSIC和ESPRIT等阵列信号处理方法很快就在提高角分辨率方面遇到了难题,尤其是在处理相对较弱的信号时。但新开发的信号处理方法却有着明显很高的数据运算和处理能力要求,带来了更大的计算工作量,因此,科学家们正在研发新的算法。显著增加的天线元件数量和对现代化计算机算力有着很高要求的DoA算法相结合,最终结果也对自动驾驶汽车硬件的运算能力提出了很高的要求。
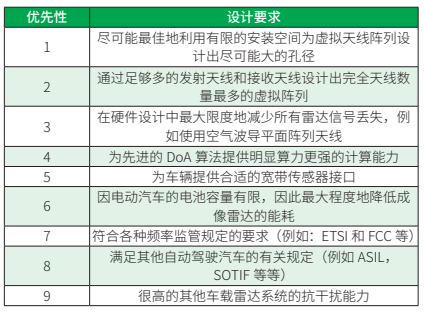
表 2. 汽车成像雷达设计的关键要求概述 © Magna
成像雷达分辨率极限和灵敏度、探测距离的提高,自然而然地导致了更高的雷达扫描探测次数。如果将成像雷达的功能简化为只是探测,并将跟踪、聚类分析、等级分析和传感信息融合等后续处理工作都交给中央计算单元来处理,就可以通过有着合适的、有着足够带宽的接口来传输大量的探测信息了。此时,1千兆的以太网接口就可以是一个很好的“合适且有着足够带宽”的接口了。但此时也还必须有另一个有着更大带宽的、用于记录产品研发和测试原始数据的第二个通讯接口。表2中概要地记录了成像雷达设计的基本要求。
真实交通状况的探测结果
Magna公司开发了两种满足上述要求的成像雷达原型机并在真实的交通环境中对它们的性能进行了测试。如果将这两款原型机的成像分辨率成功的转移到大批量生产的成像雷达中,则不仅仅能在一次探测中就感知到被测物体,而且还可以通过多次探测清楚地完成被测物体的轮廓识别和物体分类。
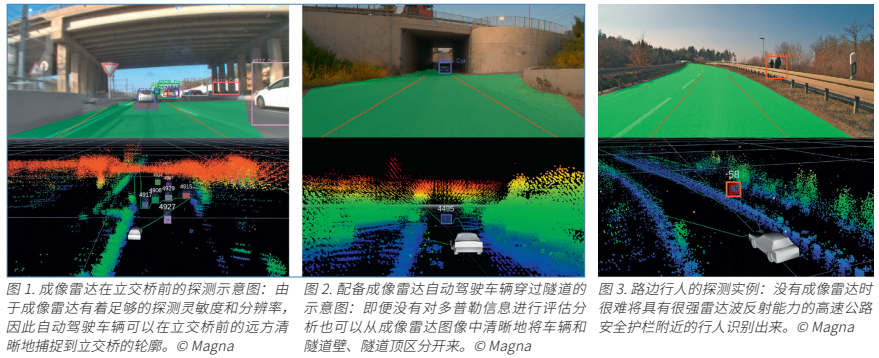
例如图1表示的是成像雷达是如何清楚地识别桥梁和桥墩、探测到车辆的距离和方位的。这些轮廓形状的识别还提供了进一步的信息,为可靠地识别桥梁和其他相关物体做出了额外的贡献。因为这些附加信息可以用作评估自动驾驶状况是否安全的一个标准。
而且方位角和仰角两个角度探测出来的物体轮廓也为可靠地区分不同物体提供了更多有用的信息。例如,在隧道中自动驾驶的车辆,只有成像雷达有足够的探测分辨率才能将隧道壁、隧道顶和前方行驶着的、或者前方静止的车辆清楚地区分开来(参见图2)。
成像雷达明显提高了探测灵敏度和物体区分能力,也能够可靠地探测出所谓的弱目标,即使这些弱目标就在强目标附近。图3所示就是这样的例子:行走在安全护栏旁的行人。这里,安全护栏代表的就是高雷达波反射的强目标、行走其间的行人为弱目标。图3中的方框中可以清楚的看到被探测到的弱目标。
本文翻译自HANSER automotive
作者:Holger Heß博士,Magna雷达开发高级经理
来源:荣格-《国际汽车设计及制造》
原创声明:
本站所有原创内容未经允许,禁止任何网站、微信公众号等平台等机构转载、摘抄,否则荣格工业传媒保留追责权利。任何此前未经允许,已经转载本站原创文章的平台,请立即删除相关文章。


